
Cuando empezamos viendo programación, arduino y robótica una de las preguntas más comunes es «y esto ¿para qué sirve?». Posiblemente la mejor forma de responder a esta pregunta sea poner ejemplos de cosas que se puede hacer.
Con esa intención ya hicimos el proyecto de controlar las luces del árbol de Navidad con arduino.
Ahora queremos presentar otro proyecto, montaje y funcionamiento de un robot hexapodo de la marca freenove.
El robot hexapodo
El robot hexapodo de la marca freenove está basado en arduino y es programable.
El robot tiene las siguientes piezas de montaje:
- piezas de acrílico
- placa controladora basada en arduino
- un adaptador wifi
- 18 servo motores, 3 motores por pata del robot
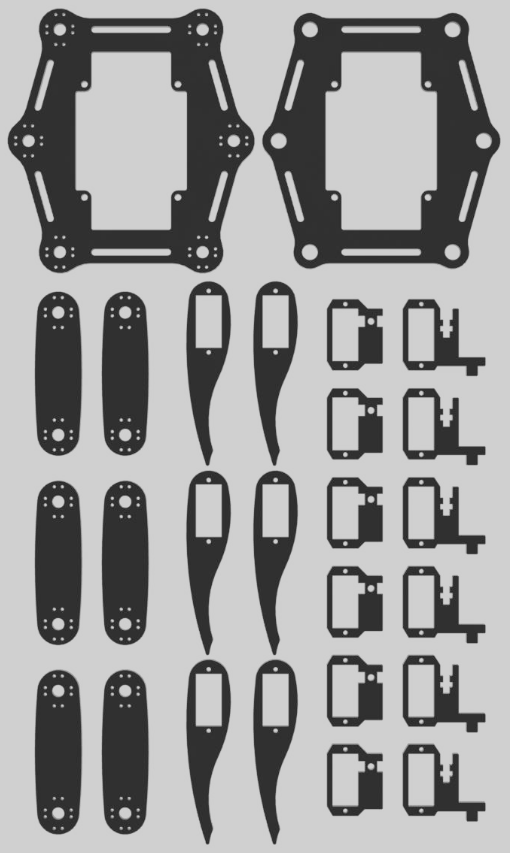
Piezas de acrílico
El robot utiliza una estructura basada en piezas de acrílico. Estas piezas son el soporte principal y las patas del robot.
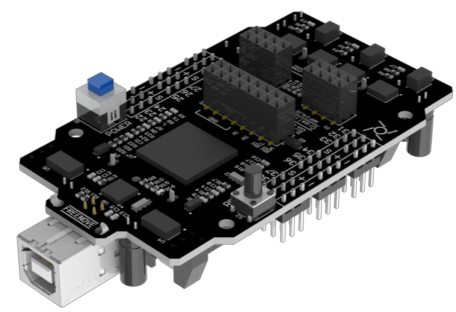
Placa basada en arduino
La placa controladora del robot está basada en arduino, es decir, no es un arduino pero, al ser arduino una plataforma abierta, han utilizado los diseños de arduino para adaptarlos y crear un propia placa controladora totalmente compatible con las especificaciones de arduino.
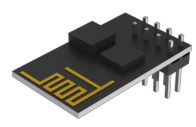
Módulo wifi
También incluye un módulo de comunicaciones wifi para poder manejar el robot de forma inalámbrica. Este módulo no es necesario ya que se podría controlar el robot por el cable usb pero indudablemente es muchísimo más cómodo controlar el robot de forma inalámbrica.
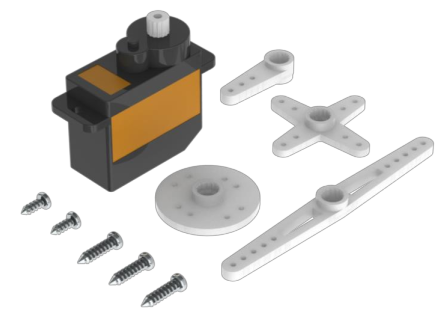
Servomotores
Quizás lo más destacable de este robot sea la cantidad de servomotores que necesita. Al tratarse de un robot hexapodo donde cada pata necesita 3 servomotores, nos encontramos con un total de 18 servomotores.
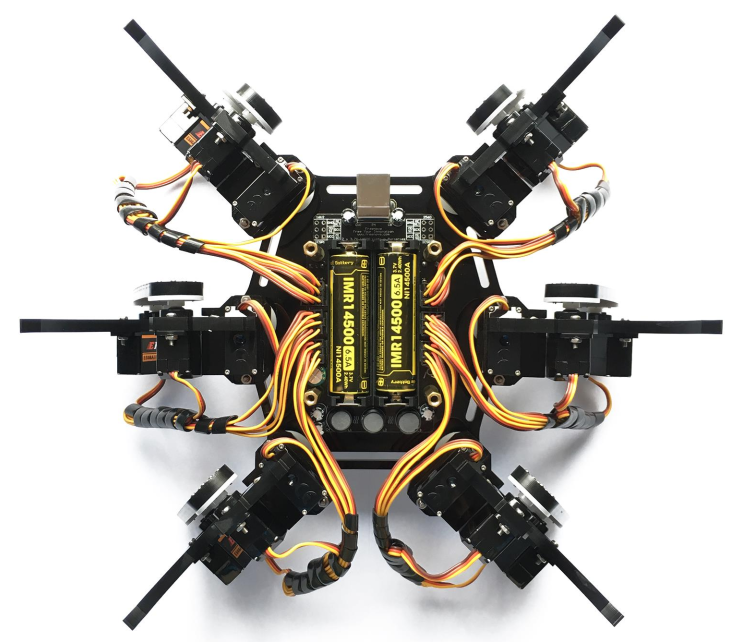
Montaje y cableado
Aunque en principio el montaje y el cableado pueda parecer muy complicado se trata de un proceso sencillo. Es verdad que son una gran cantidad de tornillos a poner muy grande, por ejemplo son 144 tornillos solo para la base donde se encaja los servomotores, pero el proceso de montaje no es complicado.
Veamos como quedaría el robot montado viendo desde la parte de abajo a falta de poner el soporte inferior del robot.
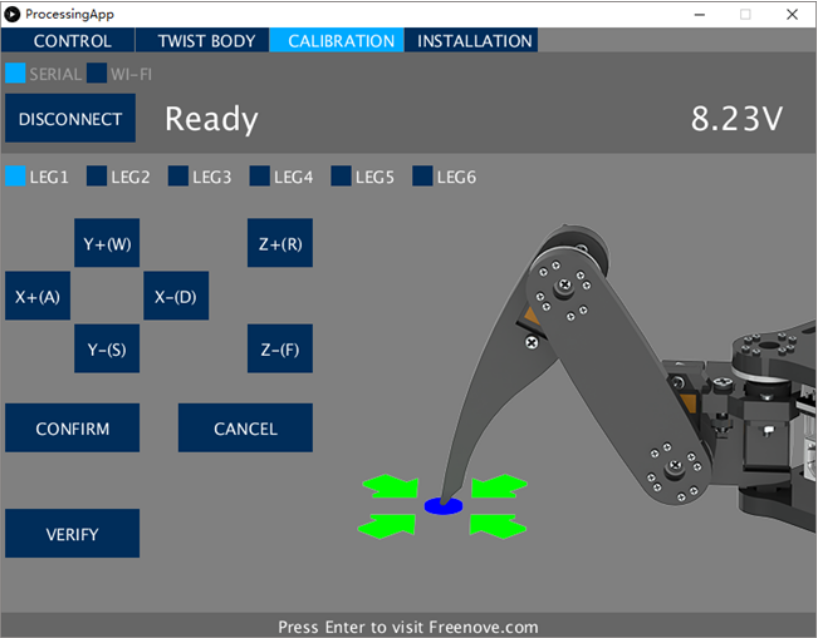
Calibración
Una vez el robot esté montado tenemos que hacer un proceso de calibración. Este proceso es necesario para que el controlador sepa en que posición se encuentran cada uno de los servo en alguna situación conocida.
Para hacer esta calibración el robot viene con una plantilla de calibración.

Con esa plantilla y con el programa de calibración tenemos que poner las patas sobre los puntos marcados.
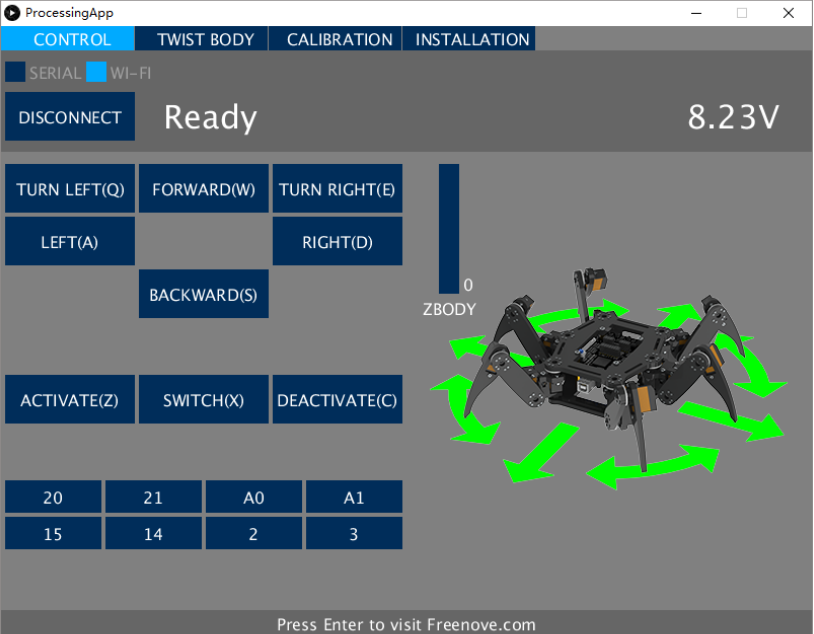
Funcionando
Con todo esto ya tendríamos nuestro robot totalmente montado y funcionando.

Con la aplicación del ordenador podríamos controlarlo tanto por el cable usb como por wifi.
y también podríamos controlarlo desde el movil con la aplicación de freenove.
Video
Pues bueno, ya hemos explicado todo el proceso por encima. Ahora os dejamos con un video donde se explican un poco el proceso de montaje y funcionamiento.
Esperamos que os hay gustado